Parameter Inference
In this notebook, we demonstrate the steps to conduct parameter inference using various likelihood approximation methods in rodeo.
# --- 0. Import libraries and modules ------------------------------------
import jax
import jax.numpy as jnp
import jaxopt
import blackjax
from functools import partial
import rodeo
from rodeo.prior import ibm_init
from rodeo.solve import solve_mv, solve_sim
from rodeo.interrogate import interrogate_chkrebtii, interrogate_kramer
from rodeo.inference import basic, fenrir, pseudo_marginal
from rodeo.utils import first_order_pad
import matplotlib.pyplot as plt
import seaborn as sns
from jax import config
config.update("jax_enable_x64", True)
Walkthrough
We will use the FitzHugh-Nagumo model as the example here which is a two-state ODE on \(\xx(t) = (V(t), R(t))\),
The model parameters are \(\tth = (a,b,c,V(0),R(0))\), with \(a,b,c > 0\) which are to be learned from the measurement model
where \(t_i = i\) and \(i=0,1,\ldots 40\) and \(\phi^2 = .04\). We will first simulate some noisy data using an highly accurate ODE solver (odeint).
# --- 1. Define the ODE-IVP ----------------------------------------------
def fitz_fun(X, t, **params):
"FitzHugh-Nagumo ODE in rodeo format."
a, b, c = params["theta"]
V, R = X[:, 0]
return jnp.array(
[[c * (V - V * V * V / 3 + R)],
[-1 / c * (V - a + b * R)]]
)
n_vars = 2
n_deriv = 3
x0 = jnp.array([-1., 1.]) # initial value for the ODE-IVP
theta = jnp.array([.2, .2, 3]) # ODE parameters
# helper function for standard first-order problems where W is fixed, it returns
# W: LHS matrix of ODE
# fitz_init_pad: Function to help initialize FN model with
# Args: x0, t, **params
# Returns: Function that takes the initial values of each variable
# and puts them in rodeo format.
W, fitz_init_pad = first_order_pad(fitz_fun, n_vars, n_deriv)
X0 = fitz_init_pad(x0, 0, theta=theta) # initial value in rodeo form
# Time interval on which a solution is sought.
t_min = 0.
t_max = 40.
# --- Define the prior process -------------------------------------------
# IBM process scale factor
sigma = jnp.array([.1] * n_vars)
# --- data simulation ------------------------------------------------------
dt_obs = 1. # interobservation time
n_steps_obs = int((t_max - t_min) / dt_obs)
# observation times
obs_times = jnp.linspace(t_min, t_max,
num=n_steps_obs + 1)
# number of simulation steps per observation
n_res = 20
n_steps = n_steps_obs * n_res
# simulation times
sim_times = jnp.linspace(t_min, t_max,
num=n_steps + 1)
# prior parameters
dt_sim = (t_max - t_min) / n_steps # grid size for simulation
prior_pars = rodeo.prior.ibm_init(
dt=dt_sim,
n_deriv=n_deriv,
sigma=sigma
)
# Produce a Pseudo-RNG key
key = jax.random.PRNGKey(100)
# calculate ODE via deterministic output
key, subkey = jax.random.split(key)
Xt, _ = rodeo.solve_mv(
key=subkey,
# define ode
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta, # ODE parameters added here
# solver parameters
n_steps=n_steps,
interrogate=rodeo.interrogate.interrogate_kramer,
prior_pars=prior_pars
)
# generate observations
noise_sd = jnp.sqrt(0.005) # Standard deviation in noise model
key, subkey = jax.random.split(key)
eps = jax.random.normal(
key=subkey,
shape=(obs_times.size, 2)
)
# 0th order derivatives at observed timepoints
obs_ind = jnp.searchsorted(sim_times, obs_times)
x = Xt[obs_ind, :, 0]
Y = x + noise_sd * eps
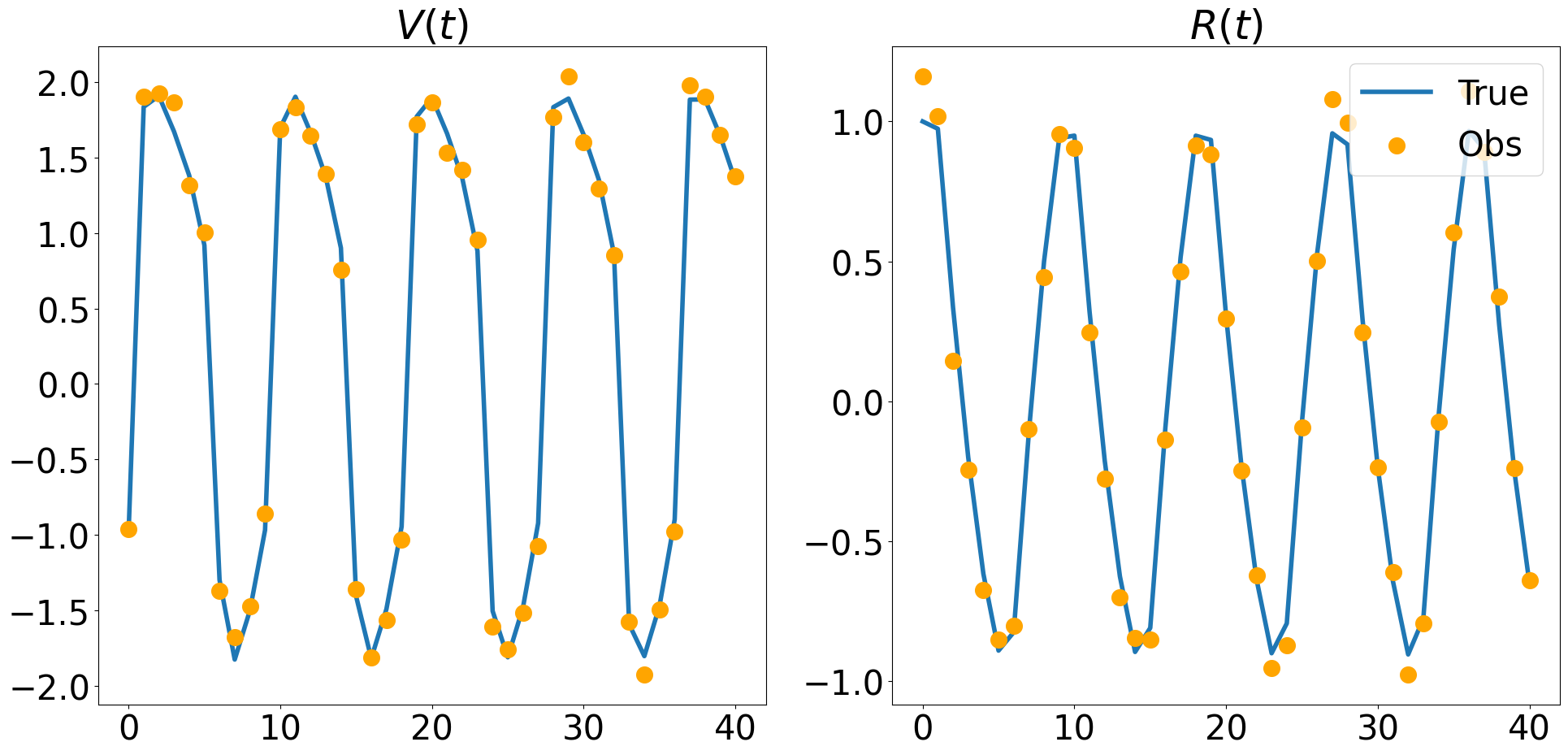
Observations are available at \(t=0,1,\ldots, 40\). However, the ODE solver requires a higher resolution than \(\Delta t = 1\) to give a good approximation. Here we use n_res=20 which means \(\Delta t = 1/20\).
# plot one graph
plt.rcParams.update({'font.size': 30})
fig1, axs = plt.subplots(1, 2, figsize=(20, 10))
axs[0].plot(obs_times, x[:,0], label = 'True', linewidth=4)
axs[0].scatter(obs_times, Y[:,0], label = 'Obs', color='orange', s=200, zorder=2)
axs[0].set_title("$V(t)$")
axs[1].plot(obs_times, x[:,1], label = 'True', linewidth=4)
axs[1].scatter(obs_times, Y[:,1], label = 'Obs', color='orange', s=200, zorder=2)
axs[1].set_title("$R(t)$")
axs[1].legend(loc=1)
fig1.tight_layout()
We now turn to the problem of parameter estimation. In the Bayesian context, this is achieved by postulating a prior distribution \(p(\TTh)\) on \(\TTh = (\tth, \pph)\), and then combining it with the stochastic solver’s likelihood function \(\Ell(\TTh \mid \YY_{0:M}) \propto p(\YY_{0:M} \mid \ZZ_{1:N} = \bz, \TTh)\) to obtain the posterior distribution
For the Basic, Fenrir, and DALTON algorithms, the high-dimensional latent ODE variables \(\XX_{0:N}\) can be approximately integrated out to produce a closed-form likelihood approximation \(\hat \Ell(\TTh \mid \YY_{0:M})\) to form the corresponding posterior approximation \(\hat p(\TTh \mid \YY_{0:M})\). While this posterior can be readily sampled from using MCMC techniques (as we shall do momentarily) Bayesian parameter estimation can also be achieved by way of a Laplace approximation. We approximate, \(p(\TTh \mid \YY_{0:M})\) is approximated by a multivariate normal distribution,
where
# --- parameter inference: basic + laplace -------------------------------
def fitz_logprior(upars):
"Logprior on unconstrained model parameters."
n_theta = 5 # number of ODE + IV parameters
lpi = jax.scipy.stats.norm.logpdf(
x=upars[:n_theta],
loc=0.,
scale=10.
)
return jnp.sum(lpi)
def fitz_loglik(obs_data, ode_data, **params):
"""
Loglikelihood for measurement model.
Args:
obs_data (ndarray(n_obs, n_vars)): Observations data.
ode_data (ndarray(n_obs, n_vars, n_deriv)): ODE solution.
"""
ll = jax.scipy.stats.norm.logpdf(
x=obs_data,
loc=ode_data[:, :, 0],
scale=noise_sd
)
return jnp.sum(ll)
def fitz_constrain_pars(upars, dt):
"""
Convert unconstrained optimization parameters into rodeo inputs.
Args:
upars : Parameters vector on unconstrainted scale.
dt : Discretization grid size.
Returns:
tuple with elements:
- theta : ODE parameters.
- X0 : Initial values in rodeo format.
- prior_pars : Prior matrices.
"""
theta = jnp.exp(upars[:3])
x0 = upars[3:5]
X0 = fitz_init_pad(x0, 0, theta=theta)
sigma = upars[5:]
prior_pars = rodeo.prior.ibm_init(
dt=dt,
n_deriv=n_deriv,
sigma=sigma
)
return theta, X0, prior_pars
def fitz_laplace(key, neglogpost, n_samples, upars_init):
"""
Sample from the Laplace approximation to the parameter posterior for the FN model.
Args:
key : PRNG key.
neglogpost: Function specifying the negative log-posterior distribution
in terms of the unconstrained parameter vector ``upars``.
upars_init: Initial value to the optimization algorithm over ``neglogpost()``.
n_samples : Number of posterior samples to draw.
Returns:
JAX array of shape ``(n_samples, 5)`` of posterior samples from ``(theta, x0)``.
"""
n_theta = 5 # number of ODE + IV parameters
# find mode of neglogpost()
solver = jaxopt.ScipyMinimize(
fun=neglogpost,
method="Newton-CG",
jit=True
)
opt_res = solver.run(upars_init)
upars_mean = opt_res.params
# variance estimate
upars_fisher = jax.jacfwd(jax.jacrev(neglogpost))(upars_mean)
# unconstrained ode+iv parameter variance estimate
uode_var = jax.scipy.linalg.inv(upars_fisher[:n_theta, :n_theta])
uode_mean = upars_mean[:n_theta]
# sample from Laplace approximation
uode_sample = jax.random.multivariate_normal(
key=key,
mean=uode_mean,
cov=uode_var,
shape=(n_samples,)
)
# convert back to original scale
ode_sample = uode_sample.at[:, :3].set(jnp.exp(uode_sample[:, :3]))
return ode_sample
Basic Likelihood
A basic approximation to the likelihood function takes the posterior mean \(\mmu_{0:N|N}(\tth, \eet) = \E_\L[\XX_{0:N} \mid \ZZ_{1:N} = \bz, \tth, \eet]\) of the rodeo solver and simply plugs it into the measurement model, such that
where in terms of the ODE solver discretization time points \(t = t_0, \ldots, t_N\), \(N \ge M\), the mapping \(n(\cdot)\) is such that \(t_{n(i)} = t'_i\). .
def neglogpost_basic(upars):
"Negative logposterior for basic approximation."
# solve ODE
theta, X0, prior_pars = fitz_constrain_pars(upars, dt_sim)
# basic loglikelihood
ll, Xt = rodeo.inference.basic(
key=key, # immaterial, since not used
# ode specification
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta,
# solver parameters
n_steps=n_steps,
interrogate=rodeo.interrogate.interrogate_kramer,
prior_pars=prior_pars,
# observations
obs_data=Y,
obs_times=obs_times,
obs_loglik=fitz_loglik
)
return -(ll + fitz_logprior(upars))
# optimization process
n_samples = 100000
upars_init = jnp.append(jnp.log(theta), x0)
upars_init = jnp.append(upars_init, jnp.ones(n_vars))
basic_post = fitz_laplace(key, neglogpost_basic, n_samples, upars_init)
Chkrebtii MCMC
The marginal MCMC method shares the same API as the Blackjax MCMC. The first step is to choose a proposal distribution. For this, we use a random walk (RW) kernel:
where \(\diag(\SSi_{rw}^2)\) is a tuning parameter for the MCMC algorithm. While Blackjax provides a RW MCMC sampler, it does not support a Metropolis–Hastings acceptance ratio that depends on the auxiliary random variable \(\XX_{0:N}\), as required for pseudo-marginal MCMC. Therefore, we use the Blackjax API to define a pseudo-marginal MCMC sampler with an RW kernel, which we provide in the rodeo.random_walk_aux module.
There are three main steps to using the marginal MCMC method. First, a likelihood function must be defined, where the ODE solver uses the interrogation method of Chkrebtii et al (2016) to sample from the solution posterior \(\hat{p}_\L(\XX_{0:N}, \ipar_{0:N} \mid \ZZ_{1:N} = \bz, \tth, \eet)\) where \(\ipar_{0:N}\) correspond to Chkrebtii interrogations. Second, a kernel must be defined, for which we use the RW kernel. Finally, an inference loop} is used to draw MCMC samples from the parameter posterior.
interrogate_chkrebtii_partial = partial(interrogate_chkrebtii, kalman_type="standard")
def fitz_logpost_mcmc(upars, key):
r"""
Compute the log-posterior for Chkrebtii's marginal MCMC algorithm.
"""
theta, X0, prior_pars = fitz_constrain_pars(upars, dt_sim)
Xt = solve_sim(
key=key,
# define ode
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta,
# solver parameters
n_steps=n_steps,
interrogate=interrogate_chkrebtii_partial,
prior_pars=prior_pars,
)
ode_data = Xt[obs_ind]
lp = fitz_logprior(upars) + fitz_loglik(Y, ode_data)
return lp, Xt
def fitz_marginal_mcmc(key, upars_init, n_samples):
"""
Sample from the parameter posterior via Chkrebtii marginal MCMC.
Args:
key : PRNG key.
upars_init : Initial value to the optimization algorithm.
n_samples : Number of posterior samples to draw.
Returns:
JAX array of shape ``(n_samples, 5)`` of posterior samples from ``(theta, x0)``.
"""
key, *subkeys = jax.random.split(key, num=3)
# standard deviation of the random walk
scale = jnp.array(
[0.01, 0.1, 0.01, 0.01, 0.01, 0.01, 0.01])
# choose the mcmc algorithm
marginal_mcmc = pseudo_marginal.normal_random_walk(fitz_logpost_mcmc, scale)
# initialize mcmc state
initial_state = marginal_mcmc.init(upars_init, subkeys[0])
# setup the kernel
kernel = marginal_mcmc.step
def inference_loop(key, kernel, initial_state, n_samples):
def one_step(state, rng_key):
state, _ = kernel(rng_key, state)
return state, state
keys = jax.random.split(key, n_samples)
_, states = jax.lax.scan(one_step, initial_state, keys)
return states
uode_sample = inference_loop(
subkeys[1], kernel, initial_state, n_samples).position[:, :5]
# convert back to original scale
ode_sample = uode_sample.at[:, :3].set(jnp.exp(uode_sample[:, :3]))
return ode_sample
# optimization process
n_samples = 10000
upars_init = jnp.append(jnp.log(theta), x0)
upars_init = jnp.append(upars_init, .1*jnp.ones(n_vars))
mcmc_post = fitz_marginal_mcmc(key, upars_init, n_samples)
Fenrir
The Fenrir method Tronarp et al (2022) is applicable to Gaussian measurement models of the form
Fenrir begins by estimating \(p_\L(\XX_{0:N} \mid \ZZ_{1:N} = \bz, \tth, \eet)\). This results in a Gaussian non-homogeneous Markov model going backwards in time,
where the coefficients \(\AA_{0:N-1}\), \(\bb_{0:N}\), and \(\CC_{0:N}\) can be derived using the Kalman filtering and smoothing recursions. In combination with the Gaussian measurement model, the integral in the likelihood function can be computed analytically.
# gaussian measurement model specification in blocked form
n_meas = 1 # number of measurements per variable in obs_data_i
obs_data = jnp.expand_dims(Y, axis=-1)
obs_weight = jnp.zeros((len(obs_data), n_vars, n_meas, n_deriv))
obs_weight = obs_weight.at[:].set(jnp.array([[[1., 0., 0.]], [[1., 0., 0.]]]))
obs_var = jnp.zeros((len(obs_data), n_vars, n_meas, n_meas))
obs_var = obs_var.at[:].set(noise_sd**2 * jnp.array([[[1.]], [[1.]]]))
The way to construct a likelihood estimation is very similar to the basic method. The one difference is that fenrir asks for obs_weight and obs_var instead of obs_loglik since it assumes observations are multivariate normal.
def neglogpost_fenrir(upars):
"Negative logposterior for basic approximation."
theta, X0, prior_pars = fitz_constrain_pars(upars, dt_sim)
# fenrir loglikelihood
ll = rodeo.inference.fenrir(
key=key, # immaterial, since not used
# ode specification
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta,
# solver
n_steps=n_steps,
interrogate=rodeo.interrogate.interrogate_kramer,
prior_pars=prior_pars,
# gaussian measurement model
obs_data=obs_data,
obs_times=obs_times,
obs_weight=obs_weight,
obs_var=obs_var
)
return -(ll + fitz_logprior(upars))
# optimization process
n_samples = 100000
upars_init = jnp.append(jnp.log(theta), x0)
upars_init = jnp.append(upars_init, jnp.ones(n_vars))
fenrir_post = fitz_laplace(key, neglogpost_fenrir, n_samples, upars_init)
Dalton
The DALTON approximation Wu and Lysy (2024) is data-adaptive in that it uses the \(\YY_{0:M}\) to approximate the ODE solution. DALTON uses the identity
def neglogpost_dalton(upars):
"Negative logposterior for basic approximation."
theta, X0, prior_pars = fitz_constrain_pars(upars, dt_sim)
# fenrir loglikelihood
ll = rodeo.inference.dalton(
key=key, # immaterial, since not used
# ode specification
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta,
# solver
n_steps=n_steps,
interrogate=rodeo.interrogate.interrogate_kramer,
prior_pars=prior_pars,
# gaussian measurement model
obs_data=obs_data,
obs_times=obs_times,
obs_weight=obs_weight,
obs_var=obs_var
)
return -(ll + fitz_logprior(upars))
# optimization process
n_samples = 100000
upars_init = jnp.append(jnp.log(theta), x0)
upars_init = jnp.append(upars_init, jnp.ones(n_vars))
dalton_post = fitz_laplace(key, neglogpost_dalton, n_samples, upars_init)
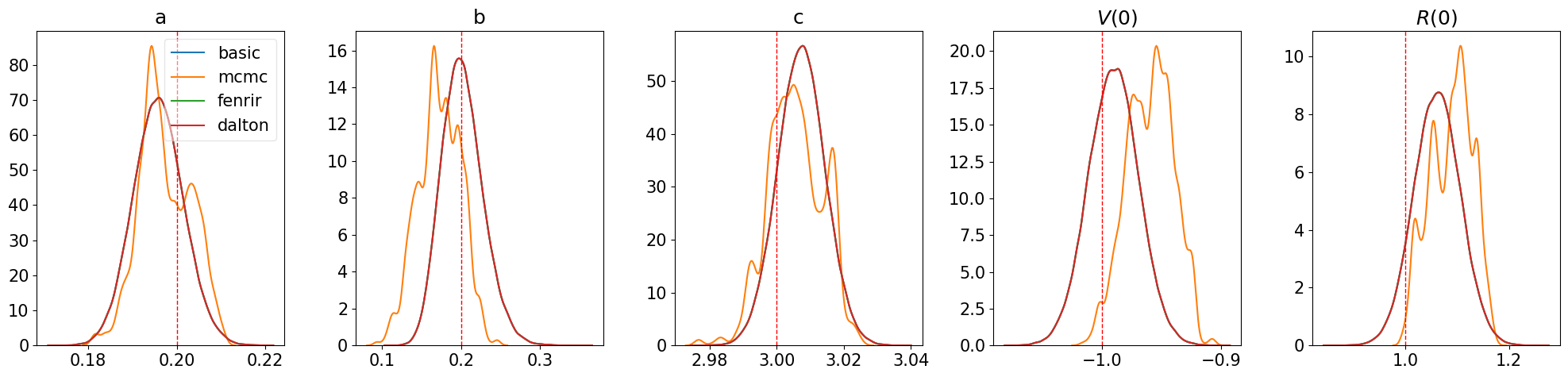
Results
We compare the likelihood estimation for the four methods. Only Chrebtii MCMC algorithm differs from the rest because it uses MCMC to sample rather than the Laplace approximation.
plt.rcParams.update({'font.size': 15})
param_true = jnp.append(theta, x0)
var_names = ['a', 'b', 'c', r"$V(0)$", r"$R(0)$"]
fig, axs = plt.subplots(1, 5, figsize=(20,5))
for i in range(5):
sns.kdeplot(basic_post[:, i], ax=axs[i], label='basic')
sns.kdeplot(mcmc_post[:, i], ax=axs[i], label='mcmc')
sns.kdeplot(fenrir_post[:, i], ax=axs[i], label='fenrir')
sns.kdeplot(dalton_post[:, i], ax=axs[i], label='dalton')
axs[i].axvline(x=param_true[i], linewidth=1, color='r', linestyle='dashed')
axs[i].set_ylabel("")
axs[i].set_title(var_names[i])
axs[0].legend(framealpha=0.5, loc='best')
fig.tight_layout()
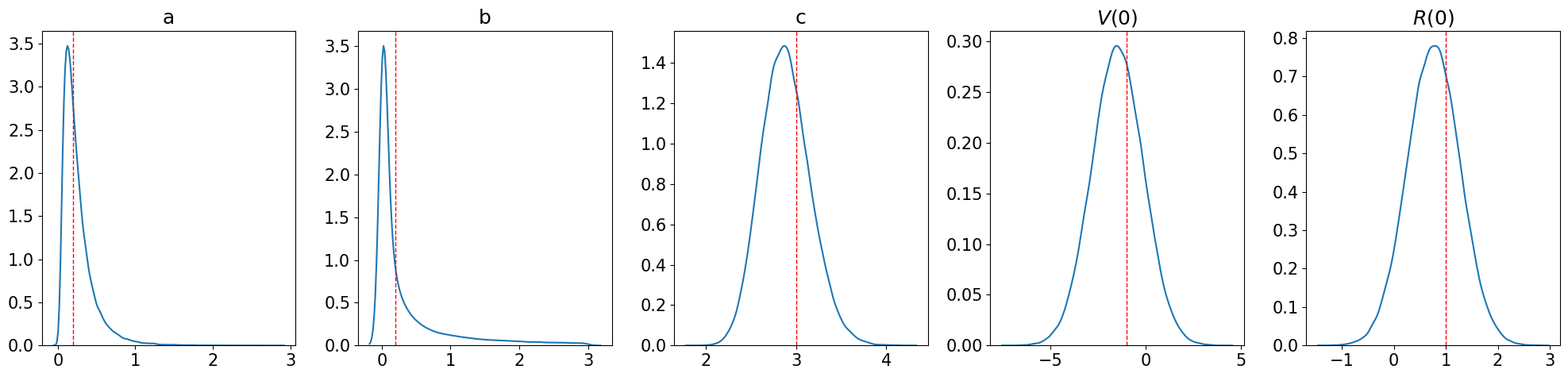
Dalton Non-Gaussian Observations
Now suppose that the noisy observation model is
where \(b_0 = 0.1\) and \(b_1 = 0.5\).
# simulate data
key = jax.random.PRNGKey(100)
b0 = 0.1
b1 = 0.5
Yt = jax.random.poisson(key,lam= jnp.exp(b0+b1*x))
obs_data = jnp.expand_dims(Yt, -1)
For non-Gaussian observations, please use daltonng. The inputs are the same as dalton with obs_weight and obs_var replaced by obs_loglik_i, which is the loglikelihood function of the observation. The rest of the process is the same as the Gaussian example.
def obs_loglik_i(obs_data_i, ode_data_i, ind, **params):
"""
Likelihood function for the SEIRAH model in non-Gaussian DALTON format.
Args:
obs_data_i : Observations at index ``ind``.
ode_data_i : ODE solution at index ``ind``.
ind : Index to determine the observation loglikelihood function.
Returns:
Loglikelihood of ``obs_data_i`` at index ``ind``.
"""
b0 = 0.1
b1 = 0.5
return jnp.sum(jax.scipy.stats.poisson.logpmf(obs_data_i.flatten(), jnp.exp(b0+b1*ode_data_i[:, 0])))
def neglogpost_daltonng(upars):
"Negative logposterior for non-Gaussian DALTON approximation."
theta, X0, prior_pars = fitz_constrain_pars(upars, dt_sim)
# non-Gaussian DALTON loglikelihood
ll = rodeo.inference.daltonng(
key=key, # immaterial, since not used
# ode specification
ode_fun=fitz_fun,
ode_weight=W,
ode_init=X0,
t_min=t_min,
t_max=t_max,
theta=theta,
# solver
n_steps=n_steps,
interrogate=rodeo.interrogate.interrogate_kramer,
prior_pars=prior_pars,
# non-gaussian measurement model
obs_data=obs_data,
obs_times=obs_times,
obs_loglik_i=obs_loglik_i
)
return -(ll + fitz_logprior(upars))
# optimization process
n_samples = 100000
upars_init = jnp.append(jnp.log(theta), x0)
upars_init = jnp.append(upars_init, jnp.ones(n_vars))
dalton_post = fitz_laplace(key, neglogpost_daltonng, n_samples, upars_init)
Results
fig, axs = plt.subplots(1, 5, figsize=(20,5))
for i in range(5):
tmp_data = dalton_post[:, i]
if i==0 or i==1:
tmp_data = tmp_data[(tmp_data>0) & (tmp_data<3)]
sns.kdeplot(tmp_data, ax=axs[i], label='dalton')
axs[i].axvline(x=param_true[i], linewidth=1, color='r', linestyle='dashed')
axs[i].set_ylabel("")
axs[i].set_title(var_names[i])
fig.tight_layout()